Էլ սարքավորումներ ավտո ինչ է ավտոբուսը կարող. CAN ավտոբուս - ինչպես է աշխատում էլեկտրոնիկան ժամանակակից մեքենաներում
Վրա այս պահինգրեթե յուրաքանչյուր ժամանակակից մեքենա հագեցած է համակարգիչներով, EBD-ներով, էլեկտրական ապակիներով և բազմաթիվ այլ էլեկտրոնային սարքերով: Այժմ այս տեխնիկան կարող է կառավարել ոչ միայն մեքենայի մեխանիկական, այլև օդաճնշական և հիդրավլիկ համակարգերը։ Եվ նույնիսկ շարժիչը չի կարող անել առանց էլեկտրոնիկայի: Ունի հատուկ սարք՝ CAN-bus։ Նրա մասին է, որ կքննարկվի այսօր։
Ծագման պատմություն
Առաջին անգամ CAN-bus հասկացությունը հայտնվեց անցյալ դարի 80-ականներին։ Այնուհետեւ գերմանական հայտնի «BOSCH» ընկերությունը «Intel» ընկերության հետ մշակել է տվյալների փոխանցման նոր թվային սարք, որը ստացել է Controller Area Network անվանումը։
Ի՞նչ կարող է նա անել:
Այս ավտոբուսը կարող է փոխկապակցել մեքենայում գտնվող բոլոր սենսորները, բլոկները և կարգավորիչները: CAN-ը կարող է շփվել իմոբլեյզերի, SRS, ESP, էլեկտրոնային շարժիչի կառավարման միավորի, փոխանցման տուփի և նույնիսկ անվտանգության բարձիկների հետ: Բացի այդ, անվադողը շփվում է կասեցման և կլիմայի կառավարման սենսորների հետ: Այս բոլոր մեխանիզմները միացված են լրիվ դուպլեքս ռեժիմով մինչև 1 Մբիթ/վրկ արագությամբ: 
CAN ավտոբուս. սարքի նկարագրությունը և առանձնահատկությունները
Չնայած իր ողջ ֆունկցիոնալությանը, այս մեխանիզմը բաղկացած է ընդամենը երկու լարից և մեկ չիպից: Նախկինում CAN ավտոբուսը հագեցած էր տասնյակ խրոցակներով՝ բոլոր սենսորներին միանալու համար: Եվ եթե 80-ականներին յուրաքանչյուր լարով փոխանցվում էր միայն մեկ ազդանշան, ապա այժմ տրված արժեքըհասնում է հարյուրի։
Ժամանակակից CAN ավտոբուսը տարբերվում է նաև նրանով, որ ունի միացման գործառույթ Բջջային հեռախոս... Այս սարքին կարող է միացված լինել նաև որպես բոցավառվող բանալի գործող էլեկտրոնային բանալի ֆոբ և տեղեկատվություն ստանալ շարժիչի կառավարման միավորից:
Կարևոր է, որ այս գործիքը կարողանա կանխատեսել մեքենայական սարքավորումների աշխատանքի անսարքությունները և, որոշ դեպքերում, վերացնել դրանք: Այն գործնականում անձեռնմխելի է միջամտությունից և ունի լավ կոնտակտային մեկուսացում: CAN ավտոբուսն ունի աշխատանքի շատ բարդ ալգորիթմ: Տվյալները, որոնք փոխանցվում են դրա միջոցով բիթերով, ակնթարթորեն վերածվում են շրջանակների: 2 լարերի ոլորված զույգը ծառայում է որպես տեղեկատվության հաղորդիչ: Կան նաև օպտիկամանրաթելային արտադրանքներ, բայց դրանք ավելի քիչ արդյունավետ են շահագործման մեջ, հետևաբար՝ ոչ այնքան տարածված, որքան առաջին տարբերակները։ Ամենաքիչ տարածվածը CAN ավտոբուսն է, որը տեղեկատվություն է փոխանցում ռադիոալիքի կամ
Ֆունկցիոնալություն և կատարում
Այս սարքի աշխատանքը բարելավելու համար արտադրողները հաճախ կրճատում են իրենց լարերի երկարությունը: Եթե ավտոբուսի ընդհանուր երկարությունը 10 մետրից պակաս է, տեղեկատվության փոխանցման արագությունը կբարձրանա մինչև 2 մեգաբիթ/վրկ: Սովորաբար, այս արագությամբ մեխանիզմը փոխանցում է տվյալներ 64 էլեկտրոնային սենսորներից և կարգավորիչներից: Եթե ավտոբուսը միացված է մեծ քանակությամբսարքեր, տեղեկատվության ընդունման և փոխանցման համար ստեղծվում են մի քանի սխեմաներ։ 
Համակարգերը համահունչ և ներդաշնակ կառավարելու, տվյալների փոխանցման որակն ու ֆունկցիոնալությունն ապահովելու համար շատ ավտոմոբիլային ընկերություններ օգտագործում են. ժամանակակից համակարգհայտնի է որպես CAN ավտոբուս: Նրա կազմակերպման սկզբունքը արժանի է մանրամասն քննարկման:
ընդհանուր բնութագրերը
Տեսողականորեն CAN ավտոբուսը ասինխրոն հաջորդականության տեսք ունի: Նրա տեղեկատվությունը փոխանցվում է երկու ոլորված հաղորդիչների, ռադիոալիքի կամ օպտիկամանրաթելային միջոցով:
Մի քանի սարքեր միաժամանակ ունակ են կառավարել ավտոբուսը։ Նրանց թիվը սահմանափակ չէ, և տեղեկատվության փոխանակման փոխարժեքը ծրագրավորված է մինչև 1 Մբիթ/վրկ:
CAN ավտոբուսը ներս ժամանակակից մեքենաներԱյն կարգավորվում է «CAN Sorcjfication version 2.0» հատկորոշմամբ:
Այն ունի երկու բաժին. Արձանագրություն Ա-ն նկարագրում է տեղեկատվության փոխանցումը 11-բիթանոց տվյալների փոխանցման համակարգի միջոցով: Բ մասը կատարում է այս գործառույթները 29-բիթանոց տարբերակն օգտագործելիս:
CAN-ն ունի անհատական ժամացույցի հանգույցներ: Նրանցից յուրաքանչյուրը միաժամանակ ազդանշաններ է ուղարկում բոլոր համակարգերին։ Ավտոբուսին կցված ընդունիչ սարքերը որոշում են, թե արդյոք ազդանշանն իրենց իրավասության մեջ է: Յուրաքանչյուր համակարգ ունի իրեն ուղղված հաղորդագրությունների ապարատային ֆիլտրում:
Սորտեր և պիտակավորում
Այսօր ամենահայտնիներից մեկը CAN ավտոբուսն է, որը մշակել է Ռոբերտ Բոշը: CAN BUS (համակարգը հայտնի է այս անունով) հաջորդական է, որտեղ զարկերակը մատակարարվում է զարկերակից հետո: Այն կոչվում է Սերիական ավտոբուս: Եթե տեղեկատվությունը փոխանցվում է մի քանի լարերով, ապա սա զուգահեռ ավտոբուս է Զուգահեռ ավտոբուս: 
I - կառավարման միավորներ;
II - համակարգային հաղորդակցություններ.
Ելնելով CAN ավտոբուսի նույնացուցիչների տեսակներից, կան երկու տեսակի նշում:
Այն դեպքում, երբ հանգույցն աջակցում է 11-բիթանոց տվյալների փոխանակման ձևաչափին և չի նշում սխալներ 29-բիթանոց նույնացուցիչ ազդանշանների վրա, այն նշվում է «CAN2,0A Active, CAN2,0B Passive»:
Երբ այս գեներատորներն օգտագործում են երկու տեսակի նույնացուցիչներ, ավտոբուսը պիտակավորված է «CAN2,0B Active»:
Կան հանգույցներ, որոնք ապահովում են հաղորդակցությունը 11-բիթանոց ձևաչափով, և երբ նրանք տեսնում են համակարգում 29-բիթանոց նույնացուցիչ, նրանք տալիս են սխալի հաղորդագրություն: Ժամանակակից մեքենաներում նման CAN ավտոբուսներ չեն օգտագործվում, քանի որ համակարգը պետք է լինի տրամաբանական և հետևողական։
Համակարգը գործում է երկու տեսակի ազդանշանի փոխանցման արագությամբ՝ 125, 250 կբիտ/վրկ: Առաջինները նախատեսված են օժանդակ սարքերի համար (պատուհաններ, լուսավորություն), իսկ երկրորդներն ապահովում են հիմնական կառավարումը (ավտոմատ փոխանցման տուփ, շարժիչ, ABS):
Ազդանշանի փոխանցում
Ֆիզիկապես ժամանակակից մեքենայի CAN ավտոբուսի հաղորդիչը կազմված է երկու բաղադրիչից. Առաջինը սև է և կոչվում է CAN-High: Երկրորդ դիրիժորը՝ նարնջագույն-շագանակագույն, կոչվում է CAN-Low: Ներկայացված կապի կառուցվածքի շնորհիվ մեքենայի շղթայից հանվել է հաղորդիչների զանգված։ Տրանսպորտային միջոցների արտադրության մեջ դա թույլ է տալիս արտադրանքի քաշը նվազեցնել մինչև 50 կգ-ով: 
Ցանցի ընդհանուր ծանրաբեռնվածությունը բաղկացած է բլոկի տարբեր դիմադրություններից, որոնք հանդիսանում են CAN ավտոբուս կոչվող արձանագրության մի մասը:
Յուրաքանչյուր համակարգի փոխանցման-ընդունման տեմպերը նույնպես տարբեր են։ Ուստի տրամադրվում է տարբեր տեսակի հաղորդագրությունների մշակումը։ CAN ավտոբուսի նկարագրության համաձայն, այս գործառույթը կատարվում է ազդանշանի փոխարկիչի միջոցով: Այն կոչվում է էլեկտրոնային դարպաս:
Այս սարքը գտնվում է կառավարման միավորի նախագծման մեջ, սակայն այն կարող է պատրաստվել առանձին սարքի տեսքով։
Ներկայացված ինտերֆեյսը օգտագործվում է նաև ախտորոշիչ ազդանշանների ելքի և մուտքագրման համար: Դրա համար ապահովվում է միասնական OBD բլոկի առկայությունը։ Սա հատուկ միակցիչ է համակարգի ախտորոշման համար:
Ավտոբուսի գործառույթների բազմազանություն
Գոյություն ունի տարբեր տեսակներներկայացված սարքը։ 
- Էներգաբլոկի KAN-ավտոբուս. Այն արագ ալիք է, որը հաղորդագրություններ է փոխանցում 500 կբ/վ արագությամբ։ Նրա հիմնական խնդիրը կառավարման ստորաբաժանումների հաղորդակցումն է, օրինակ՝ փոխանցման շարժիչը։
- «Comfort» համակարգը ավելի դանդաղ ալիք է, որը տվյալներ է փոխանցում 100 կբ/վ արագությամբ: Այն միացնում է «Comfort» համակարգի բոլոր սարքերը։
- Bus info հրամանի ծրագիրը նաև ազդանշաններ է փոխանցում դանդաղ (100 կբ/վ): Դրա հիմնական նպատակն է կապ ապահովել սպասարկման համակարգերի միջև, ինչպիսիք են հեռախոսը և նավիգացիան:
Հարցն ուսումնասիրելիս, թե ինչ է CAN ավտոբուսը, կարող է թվալ, որ ծրագրերի քանակով այն նման է ինքնաթիռի համակարգին։ Այնուամենայնիվ, վարելիս որակ, անվտանգություն և հարմարավետություն ապահովելու համար ոչ մի ծրագիր ավելորդ չի լինի։
Ավտոբուսի միջամտություն
Բոլոր կառավարման ստորաբաժանումները միացված են CAN ավտոբուսին հաղորդիչի միջոցով: Նրանք ունեն հաղորդագրությունների ընդունիչներ, որոնք ընտրովի ուժեղացուցիչներ են։
CAN ավտոբուսի նկարագրությունը սահմանում է հաղորդագրությունների ստացում Բարձր և Ցածր հաղորդիչների երկայնքով դեպի դիֆերենցիալ ուժեղացուցիչ, որտեղ այն մշակվում և ուղարկվում է կառավարման միավոր:
Ուժեղացուցիչը հայտնաբերում է այս ելքը որպես բարձր և ցածր լարերի միջև լարման տարբերություն: Այս մոտեցումը վերացնում է արտաքին միջամտության ազդեցությունը։
Հասկանալու համար, թե ինչ է իրենից ներկայացնում KAN-ավտոբուսը և դրա կառուցվածքը, պետք է հիշել նրա տեսքը։ Սրանք երկու դիրիժորներ են՝ ոլորված միասին: 
Քանի որ աղմուկի ազդանշանը միանգամից անցնում է երկու լարերին, մշակման ընթացքում Ցածր լարման արժեքը հանվում է Բարձր լարումից:
Սա CAN ավտոբուսը դարձնում է հուսալի համակարգ:
Հաղորդագրությունների տեսակները
Արձանագրությունը նախատեսում է չորս տեսակի հրամանների օգտագործում CAN ավտոբուսի միջոցով տեղեկատվության փոխանակման ժամանակ։
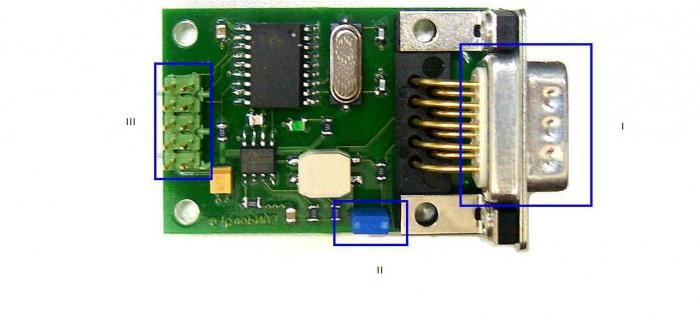
I - CAN ավտոբուս;
II - դիմադրության դիմադրություն;
III - ինտերֆեյս:
Տեղեկատվության ստացման և փոխանցման գործընթացում մեկ գործողության համար հատկացվում է որոշակի ժամանակ։ Եթե այն դուրս է եկել, սխալի շրջանակ է ստեղծվում: Սխալների շրջանակը նույնպես տևում է որոշակի ժամանակ: Թերի բլոկը ավտոմատ կերպով անջատվում է ավտոբուսից, երբ կուտակվում է մեծ թվովսխալներ.
Համակարգի ֆունկցիոնալությունը
Հասկանալու համար, թե ինչ է CAN ավտոբուսը, դուք պետք է հասկանաք դրա գործառական նպատակը:
Այն նախագծված է իրական ժամանակում կադրեր փոխանցելու համար, որոնք պարունակում են տեղեկատվություն արժեքի մասին (օրինակ՝ արագության փոփոխություն) կամ մեկ հաղորդիչ հանգույցից ծրագրային ստացողներին իրադարձության առաջացման մասին։
Հրամանը բաղկացած է 3 բաժիններից՝ անվանումը, իրադարձության արժեքը, փոփոխականի դիտարկման ժամանակը։
Հիմնական արժեքը կցվում է ցուցիչի փոփոխականին: Եթե հաղորդագրության մեջ ժամանակի տվյալներ չկան, ապա այս հաղորդագրությունն ընդունվում է համակարգի կողմից՝ ստանալուց հետո:
Երբ կապի համակարգի համակարգիչը պահանջում է պարամետրի կարգավիճակի ցուցիչ, այն ուղարկվում է առաջնահերթ կարգով:
Ավտոբուսի կոնֆլիկտի լուծում
Երբ ավտոբուսում ժամանող ազդանշանները հասնում են մի քանի կարգավորիչների, համակարգը ընտրում է, թե որ հաջորդականությամբ կմշակվի յուրաքանչյուրը: Երկու կամ ավելի սարքեր կարող են սկսել աշխատել գրեթե միաժամանակ: Կոնֆլիկտից խուսափելու համար իրականացվում է մոնիտորինգ։ Ժամանակակից մեքենայի CAN ավտոբուսը կատարում է այս գործողությունը հաղորդագրություն ուղարկելու գործընթացում։
Գոյություն ունի հաղորդագրությունների աստիճանավորում՝ ըստ առաջնահերթության և ռեցեսիվ աստիճանավորման։ Արբիտրաժային դաշտի ամենացածր թվային արտահայտությամբ տեղեկատվությունը հաղթում է, երբ ավտոբուսում կոնֆլիկտ է տեղի ունենում: Մնացած հաղորդիչները կփորձեն ավելի ուշ ուղարկել իրենց շրջանակները, եթե ոչինչ չփոխվի:
Տեղեկատվության փոխանցման գործընթացում դրանում նշված ժամանակը չի կորչում նույնիսկ համակարգի կոնֆլիկտային վիճակի առկայության դեպքում։
Ֆիզիկական բաղադրիչներ
Ավտոբուսի սարքը, բացի մալուխից, բաղկացած է մի քանի տարրերից:
Փոխանցիչի միկրոսխեմաները հաճախ հայտնաբերվում են Philips-ից, ինչպես նաև Siliconix-ից, Bosch-ից, Infineon-ից:
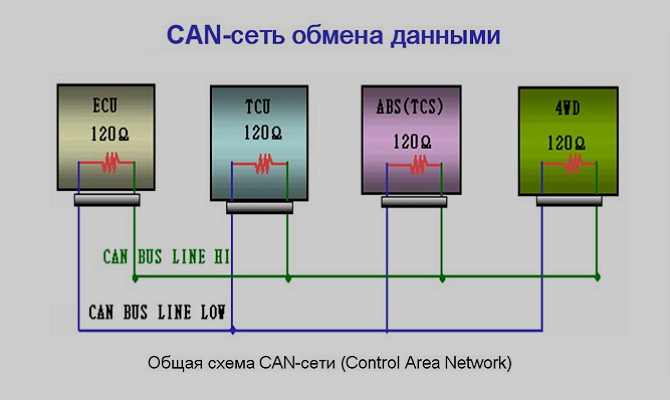
Հասկանալու համար, թե ինչ է CAN ավտոբուսը, պետք է ուսումնասիրել դրա բաղադրիչները: Հաղորդավարի առավելագույն երկարությունը 1 Մբիթ/վրկ արագությամբ հասնում է 40 մ-ի: CAN ավտոբուսը (հայտնի է նաև որպես CAN-BUS) վերջում օժտված է տերմինատորով: 
Դրա համար դիրիժորների վերջում տեղադրվում են 120 օհմ դիմադրություններ: Սա ավտոբուսի վերջում հաղորդագրությունների արտացոլումը վերացնելու և ավտոբուսի ճիշտ ընթացիկ մակարդակներն ստանալու համար է:
Հաղորդավարն ինքնին, կախված դիզայնից, կարող է լինել պաշտպանված կամ չպաշտպանված: Տերմինալի դիմադրությունը կարող է շեղվել դասականից և լինել 108-ից 132 ohms-ի սահմաններում:
ICAN տեխնոլոգիա
Անվադողերի ուսումնասիրություն փոխադրամիջոց, պետք է ուշադրություն դարձնել շարժիչի արգելափակման ծրագրին։
Դրա համար տվյալների փոխանակումը մշակվել է CAN ավտոբուսի, iCAN մոդուլի միջոցով: Այն միանում է թվային ավտոբուսին և պատասխանատու է համապատասխան հրամանի համար։
Այն ունի փոքր չափսեր և կարելի է միացնել ավտոբուսի ցանկացած հատվածին։ Երբ մեքենան սկսում է շարժվել, iCAN-ը հրաման է ուղարկում համապատասխան ստորաբաժանումներին, և շարժիչը կանգ է առնում: Այս ծրագրի առավելությունն այն է, որ ազդանշանի ընդմիջում չկա: Էլեկտրոնային միավորին հրահանգ կա, որից հետո հաղորդագրությունն անջատում է համապատասխան ակտիվացնող տարրերի աշխատանքը:
Այս տեսակի արգելափակումը բնութագրվում է ամենաբարձր գաղտնիությամբ և, հետևաբար, հուսալիությամբ: Այս դեպքում սխալները չեն գրանցվում ECU հիշողության մեջ: CAN ավտոբուսը այս մոդուլին տրամադրում է մեքենայի արագության և շարժման մասին բոլոր տեղեկությունները:
Հակագողությունից պաշտպանություն
iCAN մոդուլը տեղադրվում է ցանկացած հանգույցում, որտեղ տեղադրված են ամրագոտիները, ավտոբուսի տեղադրման վայրում: Նվազագույն չափերի և գործողությունների հատուկ ալգորիթմի շնորհիվ բացահայտեք խցանումը ավանդական մեթոդներերբ գողություն կատարելը գրեթե անիրատեսական է.
Արտաքինից այս մոդուլը քողարկված է որպես տարբեր մոնիտորինգի սենսորներ, ինչը նույնպես անհնարին է դարձնում հայտնաբերելը: Ցանկության դեպքում հնարավոր է կարգավորել սարքի աշխատանքը մեքենայի ապակիների և հայելիների ավտոմատ պաշտպանության համար:
Եթե մեքենան ունի ավտոմատ մեկնարկային շարժիչ, iCAN-ը չի խանգարի դրա աշխատանքին, քանի որ այն գործարկվում է, երբ մեքենան սկսում է շարժվել:
Ծանոթանալով սարքին և տվյալների փոխանակման սկզբունքներին, որոնցով օժտված է CAN ավտոբուսը, պարզ է դառնում, թե ինչու են բոլոր ժամանակակից մեքենաներն օգտագործում այդ տեխնոլոգիաները տրանսպորտային միջոցների կառավարումը մշակելիս:
Ներկայացված տեխնոլոգիան իր կառուցվածքով բավականին բարդ է։ Այնուամենայնիվ, դրանում ներառված բոլոր գործառույթները կապահովեն ամենաարդյունավետ, անվտանգ և հարմարավետ մեքենա վարելը:
Առկա զարգացումները կօգնեն մեքենան պաշտպանել նույնիսկ գողությունից։ Դրա շնորհիվ, ինչպես նաև մի շարք այլ գործառույթների, CAN ավտոբուսը հայտնի և պահանջված է:
- տվյալների փոխանցման արագության կարգավորումը հոսանքի մատակարարման ավելացման կամ նվազեցման միջոցով.
- հոսանքի սահմանափակում՝ սենսորի վնասումը կամ հաղորդման գծերի կարճացումը կանխելու համար.
- ջերմային պաշտպանություն.
- STO lomat մեծ գումար պարզ համակարգչային ախտորոշման համար
- Սխալը պարզելու համար հարկավոր է դիմել մասնագետներին
- Ծառայություններում աշխատում են պարզ բանալիներ, բայց լավ մասնագետ չես գտնի
Օրիգինալ գերմանական ավտոբուֆեր Power GuardԱվտոբուֆերներ - գումար խնայեք կասեցման վերանորոգման վրա, ավելացրեք հողի մաքրում+3 սմ, արագ և հեշտ տեղադրում...
Պաշտոնական կայք >>>
Ներքին էլեկտրոնիկայի համակարգեր ժամանակակից մարդատար մեքենաներում և բեռնատարներտիրապետում է հսկայական թվով լրացուցիչ սարքերի և շարժման սարքերի: Որպեսզի բոլոր սարքերի միջև տեղեկատվության փոխանակումը հնարավորինս արդյունավետ լինի, մեքենան պետք է ունենա հուսալի կապի ցանց: 20-րդ դարի 80-ականների սկզբին Bosch-ը և Intel-ի մշակողը առաջարկեցին ցանցային նոր ինտերֆեյս՝ Controller Area Network, որը հանրաճանաչորեն կոչվում է Can-bus:
1 CAN-bus ցանցային ինտերֆեյսի գործարկման սկզբունքի մասին
Ավտոմեքենայի Kan-bus-ը նախատեսված է ապահովելու ցանկացած էլեկտրոնային սարքերի միացումը, որոնք ունակ են փոխանցել և ստանալ որոշակի տեղեկատվություն: Այսպիսով, համակարգերի տեխնիկական վիճակի և կառավարման ազդանշանների վերաբերյալ տվյալները փոխանցվում են ոլորված զույգի վրա թվային ձևաչափով: Այս սխեման հնարավորություն տվեց նվազեցնել Բացասական ազդեցությունարտաքին էլեկտրամագնիսական դաշտերը և զգալիորեն մեծացնում են տվյալների փոխանցման արագությունը արձանագրության ներքո (կանոնները, որոնց համաձայն տարբեր համակարգերի կառավարման ստորաբաժանումները կարողանում են տեղեկատվություն փոխանակել):
Բացի այդ, մեքենաների զանազան «ինքներդ ինքներդ» համակարգեր ավելի հեշտացել են: Այսպիսի համակարգի օգտագործման շնորհիվ, որպես մեքենայի բորտային ցանցի մաս, ազատվեցին որոշակի քանակությամբ հաղորդիչներ, որոնք ի վիճակի են հաղորդակցություն ապահովել տարբեր արձանագրությունների միջոցով, օրինակ, շարժիչի կառավարման միավորի և ախտորոշիչ սարքավորումների միջև: , ահազանգման համակարգ։ Հենց Kan-bus-ի առկայությունն է մեքենայում, որը սեփականատիրոջը թույլ է տալիս ախտորոշել վերահսկիչի անսարքությունները և սխալները սեփական ձեռքերով՝ օգտագործելով հատուկ ախտորոշիչ սարքավորում:


CAN ավտոբուս–դա հատուկ ցանց է, որի միջոցով իրականացվում է տվյալների փոխանցում և փոխանակում տարբեր կառավարման հանգույցների միջև։Հանգույցներից յուրաքանչյուրը բաղկացած է միկրոպրոցեսորից (CPU) և CAN վերահսկիչից, որն իրականացնում է գործարկվող արձանագրությունը և ապահովում փոխազդեցություն մեքենայի ցանցի հետ: Kan ավտոբուսն ունի առնվազն երկու զույգ լարեր՝ CAN_L և CAN_H, որոնց միջոցով ազդանշանները փոխանցվում են հաղորդիչների միջոցով՝ հաղորդիչներ, որոնք ունակ են ուժեղացնել ազդանշանը ցանցի կառավարման սարքերից: Բացի այդ, հաղորդիչները կատարում են նաև այնպիսի գործառույթներ, ինչպիսիք են.
Մինչ օրս ճանաչված են երկու տեսակի հաղորդիչներ՝ բարձր արագությամբ և սխալների հանդուրժող: Առաջին տեսակը ամենատարածվածն է և համապատասխանում է ստանդարտին (ISO 11898-2), այն թույլ է տալիս տվյալներ փոխանցել վայրկյանում մինչև 1 ՄԲ արագությամբ: Երկրորդ տեսակի հաղորդիչները թույլ են տալիս ստեղծել էներգախնայող ցանց՝ մինչև 120 Կբ/վրկ փոխանցման արագությամբ, մինչդեռ այդպիսի հաղորդիչները զգայուն չեն ավտոբուսի վրա որևէ վնասի նկատմամբ:
2 Ցանցի առանձնահատկությունները
Պետք է հասկանալ, որ CAN ցանցի միջոցով տվյալները փոխանցվում են շրջանակների տեսքով: Դրանցից ամենակարևորներն են Identifire դաշտը և Data համակարգը: Kan-bus-ում ամենահաճախ օգտագործվող հաղորդագրության տեսակը Data Frame-ն է: Տվյալների փոխանցման այս տեսակը բաղկացած է, այսպես կոչված, արբիտրաժային դաշտից և որոշում է տվյալների առաջնահերթ փոխանցումը այն դեպքում, երբ մի քանի համակարգի հանգույցներ տվյալներ են փոխանցում CAN ավտոբուսին միանգամից:
Ավտոբուսին միացված կառավարման սարքերից յուրաքանչյուրն ունի իր մուտքային դիմադրությունը, և ընդհանուր բեռը հաշվարկվում է ավտոբուսին միացված բոլոր գործարկվող բլոկների գումարից: Միջին հաշվով, շարժիչի կառավարման համակարգերի մուտքային դիմադրությունը, որոնք միացված են CAN ավտոբուսին, 68-70 Օմ է, իսկ տեղեկատվական զվարճանքի համակարգի դիմադրությունը կարող է լինել մինչև 3-4 Օմ:
ԿԱՐԵՎՈՐ Է ԻՄԱՆԱԼ!
Յուրաքանչյուր ավտովարորդ պետք է ունենա նման ունիվերսալ սարք՝ իր մեքենան ախտորոշելու համար։ Այժմ, առանց autoscanner-ի, դա պարզապես ոչ մի տեղ չէ:
Դուք կարող եք կարդալ, վերակայել, վերլուծել բոլոր սենսորները և ինքնուրույն կարգավորել մեքենայի բորտ-համակարգիչը՝ օգտագործելով հատուկ սկաների ...
3 Kan-ինտերֆեյսի և համակարգի ախտորոշում
CAN կառավարման համակարգերը ոչ միայն ունեն տարբեր բեռի դիմադրություն, այլ նաև տարբեր արագությունհաղորդագրությունների փոխանցում. Այս փաստը բարդացնում է նույն տեսակի հաղորդագրությունների մշակումը բորտ ցանցում: Ժամանակակից մեքենաների ախտորոշումը պարզեցնելու համար օգտագործվում է դարպաս (դիմադրության փոխարկիչ), որը կամ պատրաստված է որպես առանձին կառավարման միավոր, կամ ներկառուցված է մեքենայի շարժիչի ECU-ում:

Նման փոխարկիչը նախատեսված է նաև որոշակի ախտորոշիչ տեղեկատվության մուտքագրման կամ ելքի համար «K» գծի մետաղալարի միջոցով, որը միացված է ախտորոշման կամ ցանցի գործարկման պարամետրերի փոփոխության ժամանակ կամ դիագնոստիկ միակցիչին կամ ուղղակիորեն փոխարկիչին:
Կարևոր է նշել, որ ներկայումս Can ցանցի միակցիչների համար հատուկ ստանդարտներ չկան: Հետևաբար, արձանագրություններից յուրաքանչյուրը որոշում է CAN ավտոբուսի միակցիչների իր տեսակը՝ կախված բեռից և այլ պարամետրերից:
Այսպիսով, ձեր սեփական ձեռքերով ախտորոշիչ աշխատանք կատարելիս օգտագործվում է միասնական OBD1 կամ OBD2 տիպի միակցիչ, որը կարելի է գտնել ժամանակակից արտասահմանյան մեքենաների և մեծ մասի վրա: կենցաղային մեքենաներ... Այնուամենայնիվ, որոշ մեքենաների մոդելներ, ինչպիսիք են Volkswagen Golf 5V, Audi S4,դարպաս չունեն. Բացի այդ, կառավարման ստորաբաժանումների և CAN ավտոբուսի սխեման անհատական է յուրաքանչյուր մեքենայի և մոդելի համար: CAN համակարգը ձեր սեփական ձեռքերով ախտորոշելու համար օգտագործվում է հատուկ սարքավորում, որը բաղկացած է օսցիլոսկոպից, CAN անալիզատորից և թվային մուլտիմետրից։
Անսարքությունների վերացումը սկսվում է ցանցի լարման հեռացմամբ (մարտկոցի բացասական տերմինալը հեռացնելով): Հաջորդը, որոշվում է ավտոբուսի լարերի միջև դիմադրության փոփոխությունը: Մեքենայում Kan-bus-ի անսարքությունների ամենատարածված տեսակներն են կարճ կամ բաց գիծը, բեռնվածության դիմադրիչների խափանումը և ցանցի տարրերի միջև հաղորդագրությունների փոխանցման մակարդակի նվազումը: Որոշ դեպքերում հնարավոր չէ ախտորոշել խնդիրը առանց Can Analyzer-ի:
Դուք դեռ կարծում եք, որ մեքենայի ախտորոշումը դժվար է:
Եթե դուք կարդում եք այս տողերը, ապա դուք շահագրգռված եք ինքներդ ինչ-որ բան անել մեքենայում և իսկապես փրկելքանի որ դուք արդեն գիտեք, որ.
Եվ, իհարկե, հոգնել եք փողը դեն նետելուց, և անընդհատ սպասարկման կետով շրջելու հարց չկա, ապա ձեզ հարկավոր է պարզ ELM327 AUTOSSCANER, որը միանում է ցանկացած մեքենայի և սովորական սմարթֆոնի միջոցով դուք միշտ խնդիր կգտնեք, մարիր ՉԵԿ-ը և շատ խնայիր !!!
Մենք ինքներս փորձարկել ենք այս սկաները տարբեր մեքենաների վրա:և այն ցույց տվեց գերազանց արդյունքներ, այժմ մենք այն խորհուրդ ենք տալիս ԲՈԼՈՐԻՆ: Որպեսզի չընկնես չինական կեղծիքի վրա, մենք այստեղ հղում ենք հրապարակում AutoScanner-ի պաշտոնական կայքին:





