Auto electrical equipment, ano ang channel bus? CAN bus - kung paano gumagana ang electronics sa mga modernong sasakyan
Naka-on sa sandaling ito Halos bawat modernong kotse ay nilagyan ng mga on-board na computer, EBD, mga de-kuryenteng bintana at marami pang ibang elektronikong kagamitan. Ngayon ang gayong kagamitan ay maaaring makontrol hindi lamang mekanikal, kundi pati na rin ang mga pneumatic at hydraulic system ng makina. At kahit na ang makina ay hindi magagawa nang walang electronics. Naglalaman ito ng isang espesyal na aparato - isang CAN bus. Ito mismo ang pag-uusapan natin ngayon.
Kasaysayan ng pinagmulan
Ang konsepto ng isang CAN bus ay unang lumitaw noong 80s ng huling siglo. Pagkatapos ang sikat na kumpanya ng Aleman na BOSCH, kasama ang Intel, ay bumuo ng isang bagong digital na aparato para sa paghahatid ng data, na tinatawag na Controller Area Network.
Ano ang magagawa niya?
Maaaring ikonekta ng bus na ito ang lahat ng mga sensor, block at controller na matatagpuan sa kotse. CAN ay maaaring kumonekta sa immobilizer, SRS, ESP, ECU, transmission at kahit airbags. Bilang karagdagan, ang gulong ay nakikipag-ugnayan sa mga suspensyon at mga sensor ng pagkontrol sa klima. Ang lahat ng mga mekanismong ito ay konektado sa duplex mode na may hanggang 1 Mbit/s. 
CAN bus: paglalarawan at mga tampok ng device
Sa lahat ng pag-andar nito, ang mekanismong ito ay binubuo lamang ng dalawang wire at isang chip. Noong nakaraan, ang CAN bus ay nilagyan ng dose-dosenang mga plug upang kumonekta sa lahat ng mga sensor. At kung noong 80s ay isang signal lamang ang ipinadala sa bawat wire, ngayon binigay na halaga umabot ng daan-daan.
Ang modernong CAN bus ay nakikilala din sa katotohanan na mayroon itong function ng pagkonekta sa cellphone. Ang isang electronic key fob na gumagana bilang isang ignition key ay maaari ding ikonekta sa device na ito at makatanggap ng impormasyon mula sa engine control unit.
Mahalagang matukoy ng tool na ito ang mga problema sa paggana ng kagamitan sa makina at, sa ilang mga kaso, alisin ang mga ito. Ito ay halos immune sa interference at may magandang contact insulation. Ang CAN bus ay may napakakomplikadong operating algorithm. Ang data na ipinadala sa pamamagitan nito sa mga bit ay agad na na-convert sa mga frame. Ang 2-wire turn pair ay nagsisilbing conductor ng impormasyon. Mayroon ding mga produkto na ginawa mula sa fiber optics, ngunit ang mga ito ay hindi gaanong mahusay sa pagpapatakbo at samakatuwid ay hindi kasing laganap ng mga unang opsyon. Ang hindi gaanong karaniwan ay ang CAN bus, na nagpapadala ng impormasyon sa pamamagitan ng radio channel o
Pag-andar at pagganap
Upang mapabuti ang pagganap ng device na ito, madalas na pinaikli ng mga tagagawa ang haba ng kanilang mga wire. Kung ang kabuuang haba ng bus ay mas mababa sa 10 metro, ang bilis ng paglilipat ng impormasyon ay tataas sa 2 megabit bawat segundo. Karaniwan, sa bilis na ito, ang mekanismo ay nagpapadala ng data mula sa 64 electronic sensor at controllers. Kung konektado sa bus malaking dami mga device, maraming circuit ang nilikha upang tumanggap at magpadala ng impormasyon. 
Upang pamahalaan ang mga system nang magkakaugnay at maayos at matiyak ang kalidad at pag-andar ng paghahatid ng data, maraming mga kumpanya ng automotive ang gumagamit modernong sistema, na kilala bilang CAN bus. Ang prinsipyo ng organisasyon nito ay nararapat sa detalyadong pagsasaalang-alang.
pangkalahatang katangian
Biswal, ang CAN bus ay mukhang isang asynchronous sequence. Ang impormasyon nito ay ipinapadala sa dalawang baluktot na konduktor, isang radio channel o optical fiber.
Maaaring kontrolin ng ilang device ang bus nang sabay-sabay. Ang kanilang numero ay hindi limitado, at ang bilis ng pagpapalitan ng impormasyon ay naka-program hanggang sa 1 Mbit/s.
PWEDE mag bus mga modernong sasakyan kinokontrol ng detalyeng "CAN Sorcification version 2.0".
Binubuo ito ng dalawang seksyon. Inilalarawan ng Protocol A ang paglilipat ng impormasyon gamit ang isang 11-bit na data transmission system. Ginagawa ng Part B ang mga function na ito kapag ginagamit ang 29-bit na bersyon.
Ang CAN ay may mga personal na clock generator node. Ang bawat isa sa kanila ay nagpapadala ng mga signal sa lahat ng mga sistema nang sabay-sabay. Tinutukoy ng mga tumatanggap na device na nakakonekta sa bus kung nasa loob ng kanilang hurisdiksyon ang signal. Ang bawat sistema ay may hardware na pag-filter ng mga mensahe na naka-address dito.
Mga uri at pag-label
Isa sa pinakasikat ngayon ay ang CAN bus na binuo ni Robert Bosch. CAN BUS (ang sistema ay kilala sa pangalang ito) ay maaaring sunud-sunod, kung saan ang pulso ay binibigyan ng pulso sa pamamagitan ng pulso. Ito ay tinatawag na Serial bus. Kung ang impormasyon ay ipinadala sa maraming mga wire, kung gayon ito ay isang parallel na bus. 
I - control unit;
II - sistema ng komunikasyon.
Batay sa mga uri ng CAN bus identifier, mayroong dalawang uri ng pagmamarka.
Sa kaso kapag ang isang node ay sumusuporta sa isang 11-bit na format ng pagpapalitan ng impormasyon at hindi nagsasaad ng mga error sa 29-bit na identifier signal, ito ay minarkahan ng "CAN2.0A Active, CAN2.0B Passive".
Kapag ang mga naturang generator ay gumagamit ng parehong uri ng mga identifier, ang bus ay may label na "CAN2.0B Active".
May mga node na sumusuporta sa mga komunikasyon sa 11-bit na format, ngunit kapag nakakita sila ng 29-bit na identifier sa system, nagpapakita sila ng mensahe ng error. Sa modernong mga kotse, ang mga ganitong CAN bus ay hindi ginagamit, dahil ang sistema ay dapat na lohikal at pare-pareho.
Gumagana ang system sa dalawang uri ng mga rate ng paghahatid ng signal - 125, 250 kbit/s. Ang una ay inilaan para sa mga pantulong na aparato (window lifters, lighting), at ang huli ay nagbibigay ng pangunahing kontrol (awtomatikong paghahatid, engine, ABS).
Pagpapadala ng signal
Sa pisikal, ang CAN bus conductor ng isang modernong kotse ay gawa sa dalawang bahagi. Ang una ay itim at tinatawag na CAN-High. Ang pangalawang konduktor, orange-brown, ay tinatawag na CAN-Low. Salamat sa ipinakita na istraktura ng komunikasyon, maraming mga konduktor ang tinanggal mula sa circuit ng kotse. Sa paggawa ng mga sasakyan, pinapayagan nito ang bigat ng produkto na mabawasan hanggang 50 kg. 
Ang kabuuang network load ay binubuo ng mga nakahiwalay na block resistance na bahagi ng isang protocol na tinatawag na CAN bus.
Ang bilis ng paghahatid at pagtanggap ng bawat sistema ay iba rin. Samakatuwid, sinisiguro ang pagproseso ng iba't ibang uri ng mensahe. Ayon sa paglalarawan ng CAN bus, ang function na ito ay ginagawa ng isang signal converter. Ito ay tinatawag na electronic gateway.
Matatagpuan ang device na ito sa disenyo ng control unit, ngunit maaaring idisenyo bilang isang hiwalay na device.
Ang ipinakita na interface ay ginagamit din sa output at input ng mga diagnostic signal. Para sa layuning ito, isang pinag-isang bloke ng OBD ay ibinigay. Ito ay isang espesyal na konektor para sa mga diagnostic ng system.
Mga uri ng pag-andar ng bus
Umiiral iba't ibang uri iniharap na aparato. 
- CAN bus ng power unit. Ito ay isang mabilis na channel na nagpapadala ng mga mensahe sa bilis na 500 kbit/s. Ang pangunahing gawain nito ay makipag-usap sa pagitan ng mga control unit, halimbawa transmission-engine.
- Ang Comfort system ay isang mas mabagal na channel, na nagpapadala ng data sa bilis na 100 kbit/s. Iniuugnay nito ang lahat ng device ng Comfort system.
- Ang bus command program ay nagpapadala rin ng mga signal nang mabagal (100 kbit/s). Ang pangunahing layunin nito ay magbigay ng komunikasyon sa pagitan ng mga sistema ng serbisyo, tulad ng telepono at nabigasyon.
Kapag pinag-aaralan ang tanong kung ano ang CAN bus, maaaring mukhang sa mga tuntunin ng bilang ng mga programa ay katulad ito sa isang sistema ng sasakyang panghimpapawid. Gayunpaman, upang matiyak ang kalidad, kaligtasan at kaginhawaan kapag nagmamaneho, walang mga programa ang magiging kalabisan.
Panghihimasok ng bus
Ang lahat ng control unit ay konektado sa CAN bus ng mga transceiver. Mayroon silang mga receiver ng mensahe, na mga selective amplifier.
Ang paglalarawan ng CAN bus ay nagsasaad ng pagdating ng mga mensahe kasama ang High at Low conductors sa differential amplifier, kung saan ito pinoproseso at ipinadala sa control unit.
Tinutukoy ng amplifier ang output signal na ito bilang pagkakaiba sa boltahe sa pagitan ng High at Low na mga wire. Tinatanggal ng diskarteng ito ang impluwensya ng panlabas na panghihimasok.
Upang maunawaan kung ano ang CAN bus at ang istraktura nito, dapat mong tandaan ang hitsura nito. Ito ay dalawang konduktor na pinagsama-sama. 
Dahil ang interference signal ay dumating sa parehong mga wire nang sabay-sabay, sa panahon ng pagpoproseso ng Mababang boltahe na halaga ay ibinabawas mula sa Mataas na boltahe.
Salamat dito, ang CAN bus ay itinuturing na isang maaasahang sistema.
Mga Uri ng Mensahe
Ang protocol ay nagbibigay para sa paggamit ng apat na uri ng mga utos kapag nagpapalitan ng impormasyon sa pamamagitan ng CAN bus.
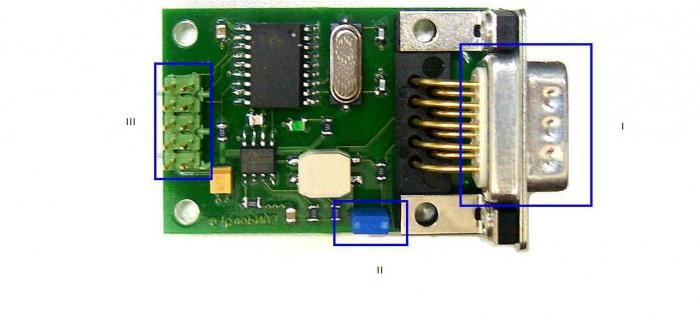
AKO - CAN bus;
II - risistor ng paglaban;
III - interface.
Sa proseso ng pagtanggap at pagpapadala ng impormasyon, ang isang tiyak na oras ay inilaan para sa isang operasyon. Kung nabigo ito, bubuo ng frame ng error. Ang Error Frame ay tumatagal din ng ilang oras. Ang may sira na unit ay awtomatikong nadidiskonekta sa bus kapag naipon malaking dami mga pagkakamali.
Pag-andar ng system
Upang maunawaan kung ano ang CAN bus, kailangan mong maunawaan ang functional na layunin nito.
Ito ay idinisenyo upang magpadala ng mga real-time na frame na naglalaman ng impormasyon tungkol sa isang halaga (halimbawa, isang pagbabago sa bilis) o ang paglitaw ng isang kaganapan mula sa isang transmitter node patungo sa mga receiver ng programa.
Binubuo ang command ng 3 seksyon: pangalan, halaga ng kaganapan, oras ng pagmamasid ng variable.
Ang pangunahing kahalagahan ay nakalakip sa variable na tagapagpahiwatig. Kung ang mensahe ay walang impormasyon sa oras, ang mensaheng ito ay tinatanggap ng system sa oras na matanggap.
Kapag humiling ang computer system ng komunikasyon ng parameter status indicator, ipinapadala ito sa priority order.
Resolusyon sa Paglalaban ng Bus
Kapag dumating ang mga signal sa bus sa maraming controllers, pipiliin ng system kung anong pagkakasunud-sunod ang ipoproseso ng bawat isa. Ang dalawa o higit pang mga device ay maaaring magsimulang gumana nang halos sabay-sabay. Upang matiyak na walang salungatan na lumitaw, isinasagawa ang pagsubaybay. Ginagawa ng CAN bus ng isang modernong kotse ang operasyong ito habang nagpapadala ng mensahe.
Mayroong gradation ng mga mensahe ayon sa priority at recessive gradation. Ang impormasyon na may pinakamababang halaga ng numero ng field ng arbitrasyon ay mananalo kapag may nangyaring salungatan sa bus. Susubukan ng natitirang mga transmiter na ipadala ang kanilang mga frame sa ibang pagkakataon kung walang magbabago.
Sa proseso ng pagpapadala ng impormasyon, ang oras na tinukoy dito ay hindi mawawala kahit na mayroong isang sitwasyon ng salungatan sa system.
Mga sangkap na pisikal
Ang aparato ng bus ay binubuo, bilang karagdagan sa cable, ng ilang mga elemento.
Ang mga chips ng transceiver ay madalas na matatagpuan mula sa Philips, pati na rin ang Siliconix, Bosch, Infineon.
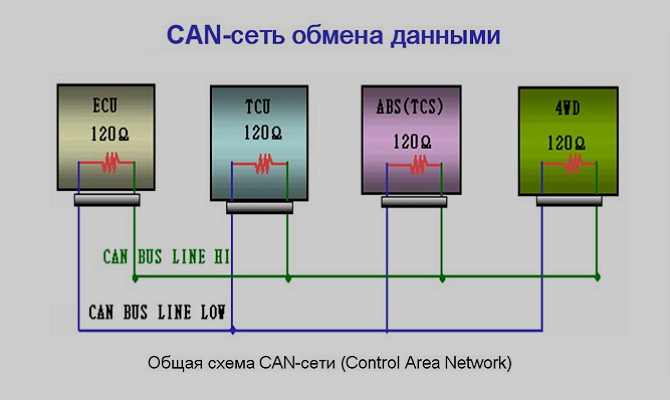
Upang maunawaan kung ano ang CAN bus, dapat mong pag-aralan ang mga bahagi nito. Ang maximum na haba ng konduktor sa bilis na 1 Mbit/s ay umaabot sa 40 m Ang CAN bus (kilala rin bilang CAN-BUS) ay nilagyan ng terminator sa dulo. 
Upang gawin ito, ang 120 Ohm resistors ay naka-install sa dulo ng conductors. Ito ay kinakailangan upang maalis ang mga pagmuni-muni ng mensahe sa dulo ng bus at matiyak na natatanggap nito ang naaangkop na kasalukuyang mga antas.
Ang konduktor mismo, depende sa disenyo, ay maaaring maging shielded o unshielded. Ang paglaban sa dulo ay maaaring lumihis mula sa klasiko at saklaw mula 108 hanggang 132 Ohms.
teknolohiya ng iCAN
Nakatingin sa mga gulong sasakyan, dapat bigyang pansin ang programa ng pagharang ng engine.
Para sa layuning ito, ang pagpapalitan ng data sa pamamagitan ng CAN bus, iCAN module, ay binuo. Kumokonekta ito sa digital bus at responsable para sa kaukulang utos.
Maliit ito sa laki at nakakabit sa anumang kompartamento ng gulong. Kapag nagsimula nang umandar ang sasakyan, magpapadala ang iCAN ng utos sa kaukulang mga bloke, at huminto ang makina. Ang bentahe ng programang ito ay ang kawalan ng signal interruption. Ang elektronikong yunit ay itinuro, pagkatapos nito ay hindi pinapagana ng mensahe ang paggana ng mga kaukulang actuator.
Ang ganitong uri ng pagharang ay nailalarawan sa pamamagitan ng pinakamataas na lihim at, samakatuwid, pagiging maaasahan. Sa kasong ito, ang mga error ay hindi naitala sa memorya ng ECU. Ang CAN bus ay nagbibigay ng lahat ng impormasyon tungkol sa bilis at paggalaw ng sasakyan sa modyul na ito.
Proteksyon laban sa pagnanakaw
Ang iCAN module ay naka-install sa anumang node kung saan matatagpuan ang mga harnesses, kung saan naka-install ang bus. Dahil sa kaunting sukat at espesyal na algorithm ng mga aksyon, kilalanin ang pagbara mga karaniwang pamamaraan kapag nagnanakaw ay halos imposible.
Sa panlabas, ang modyul na ito ay disguised bilang iba't ibang mga sensor ng pagsubaybay, na ginagawang imposible ring makita. Kung ninanais, posibleng i-configure ang pagpapatakbo ng device upang awtomatikong protektahan ang mga bintana at salamin ng kotse.
Kung ang sasakyan ay may awtomatikong pagsisimula ng makina, ang iCAN ay hindi makagambala sa operasyon nito, dahil ito ay na-trigger kapag ang sasakyan ay nagsimulang gumalaw.
Ang pagkakaroon ng pamilyar sa istraktura at mga prinsipyo ng pagpapalitan ng data kung saan pinagkalooban ang CAN bus, nagiging malinaw kung bakit ginagamit ng lahat ng modernong kotse ang mga teknolohiyang ito kapag bumubuo ng kontrol ng sasakyan.
Ang ipinakita na teknolohiya ay medyo kumplikado sa disenyo nito. Gayunpaman, ang lahat ng mga pag-andar na kasama dito ay titiyakin ang pinaka mahusay, ligtas at komportableng pagmamaneho.
Ang mga kasalukuyang pag-unlad ay makakatulong na matiyak ang proteksyon ng sasakyan kahit na mula sa pagnanakaw. Salamat dito, pati na rin ang isang kumplikado ng iba pang mga pag-andar, ang CAN bus ay sikat at hinihiling.
- pagsasaayos ng rate ng paglilipat ng data sa pamamagitan ng pagtaas o pagbaba ng kasalukuyang supply;
- kasalukuyang paglilimita upang maiwasan ang pinsala sa sensor o shorting ng mga linya ng paghahatid;
- proteksyon sa init.
- Ang mga istasyon ng serbisyo ay naniningil ng maraming pera para sa mga simpleng diagnostic ng computer
- Upang malaman ang error kailangan mong pumunta sa mga espesyalista
- Gumagamit ang mga serbisyo ng mga simpleng impact wrenches, ngunit hindi ka makakahanap ng mahusay na espesyalista
Orihinal na German autobuffers Power GuardAutobuffers - makatipid ng pera sa pag-aayos ng suspensyon, pagtaas ground clearance+3 cm, mabilis at madaling pag-install...
Opisyal na website >>>
On-board electronics system sa mga modernong pampasaherong sasakyan at mga trak may malaking bilang ng mga karagdagang device at actuator. Upang ang pagpapalitan ng impormasyon sa pagitan ng lahat ng mga aparato ay maging mahusay hangga't maaari, ang kotse ay dapat magkaroon ng isang maaasahang network ng komunikasyon. Noong unang bahagi ng 80s ng ika-20 siglo, iminungkahi ng Bosch at developer na Intel ang isang bagong interface ng network - Controller Area Network, na sikat na tinatawag na Can-bus.
1 Tungkol sa operating prinsipyo ng CAN-bus network interface
Ang can-bus sa isang kotse ay idinisenyo upang magbigay ng koneksyon sa anumang mga elektronikong aparato na may kakayahang magpadala at tumanggap ng ilang partikular na impormasyon. Kaya, ang data sa teknikal na kondisyon ng mga system at control signal ay pumasa sa twisted pair cable sa digital na format. Ang scheme na ito ay naging posible upang mabawasan Negatibong impluwensya panlabas na electromagnetic field at makabuluhang taasan ang bilis ng paglilipat ng data sa pamamagitan ng protocol (ang mga patakaran kung saan ang mga control unit ng iba't ibang mga system ay maaaring makipagpalitan ng impormasyon).
Bilang karagdagan, ang mga DIY car system ay naging mas madali. Dahil sa paggamit ng naturang sistema bilang bahagi ng on-board network ng sasakyan, ang isang tiyak na bilang ng mga konduktor ay napalaya, na may kakayahang magbigay ng komunikasyon sa pamamagitan ng iba't ibang mga protocol, halimbawa, sa pagitan ng yunit ng kontrol ng engine at kagamitan sa diagnostic, Sistemang pang-alarma. Ito ay ang pagkakaroon ng Kan-bus sa kotse na nagpapahintulot sa may-ari na makilala ang mga malfunction at error ng controller gamit ang kanyang sariling mga kamay gamit ang mga espesyal na kagamitan sa diagnostic.


CAN bus–Ito ay isang espesyal na network kung saan ang data ay ipinadala at ipinagpapalit sa pagitan ng iba't ibang mga control node. Ang bawat node ay binubuo ng isang microprocessor (CPU) at isang CAN controller, sa tulong kung saan ang executable protocol ay ipinatupad at ang pakikipag-ugnayan sa network ng sasakyan ay sinisiguro. Ang Kan bus ay may hindi bababa sa dalawang pares ng mga wire - CAN_L at CAN_H, kung saan ang mga signal ay ipinapadala sa pamamagitan ng mga transceiver - mga transceiver na may kakayahang palakasin ang signal mula sa mga network control device. Bilang karagdagan, ang mga transceiver ay gumaganap ng mga function tulad ng:
Ngayon, dalawang uri ng transceiver ang kinikilala - High Speed at Fault Tolerant. Ang unang uri ay ang pinakakaraniwan at sumusunod sa pamantayan (ISO 11898-2), pinapayagan ka nitong maglipat ng data sa bilis na hanggang 1MB bawat segundo. Ang pangalawang uri ng mga transceiver ay nagbibigay-daan sa iyo na lumikha ng isang network na nakakatipid ng enerhiya na may bilis ng paghahatid na hanggang 120 Kb/sec, habang ang mga naturang transmitters ay hindi sensitibo sa anumang pinsala sa mismong bus.
2 Mga tampok ng network
Dapat itong maunawaan na ang data ay ipinadala sa CAN network sa anyo ng mga frame. Ang pinakamahalaga sa kanila ay ang field ng identifier (Identifire) at ang data system (Data). Ang pinakakaraniwang ginagamit na uri ng mensahe sa Kanbus ay Data Frame. Ang ganitong uri ng paglilipat ng data ay binubuo ng isang tinatawag na field ng arbitrasyon at tinutukoy ang priyoridad na paglilipat ng data kung sakaling ang ilang mga system node ay sabay-sabay na nagpapadala ng data sa CAN bus.
Ang bawat isa sa mga control device na konektado sa bus ay may sarili nitong input resistance, at ang kabuuang load ay kinakalkula mula sa kabuuan ng lahat ng executable block na konektado sa bus. Sa karaniwan, ang input resistance ng engine control system na konektado sa CAN bus ay 68-70 Ohms, at ang resistensya ng information at command system ay maaaring hanggang 3-4 Ohms.
MAHALAGANG MALAMAN!
Ang bawat motorista ay dapat magkaroon ng isang unibersal na aparato para sa pag-diagnose ng kanyang sasakyan. Sa ngayon, hindi ka mabubuhay nang walang scanner ng kotse!
Maaari mong basahin, i-reset, suriin ang lahat ng mga sensor at i-configure ang on-board na computer ng kotse nang mag-isa gamit ang isang espesyal na scanner...
3 CAN interface at system diagnostics
Ang CAN control system ay hindi lamang may iba't ibang resistensya sa pagkarga, kundi pati na rin ibang bilis paghahatid ng mensahe. Ang katotohanang ito ay nagpapalubha sa pagproseso ng mga katulad na mensahe sa loob ng on-board network. Upang pasimplehin ang mga diagnostic, ang mga modernong kotse ay gumagamit ng interface ng gateway (resistance converter), na idinisenyo bilang isang hiwalay na control unit o nakapaloob sa ECU ng makina ng kotse.

Ang naturang converter ay idinisenyo din upang mag-input o mag-output ng ilang partikular na diagnostic na impormasyon sa pamamagitan ng "K" -line wire, na konektado sa panahon ng diagnostics o pagpapalit ng mga parameter ng pagpapatakbo ng network alinman sa diagnostic connector o direkta sa converter.
Mahalagang tandaan na kasalukuyang walang tiyak na mga pamantayan para sa mga konektor ng Can network. Samakatuwid, tinutukoy ng bawat protocol ang sarili nitong uri ng mga konektor sa CAN bus, depende sa load at iba pang mga parameter.
Kaya, kapag nagsasagawa ng diagnostic na gawain gamit ang iyong sariling mga kamay, ang isang pinag-isang OBD1 o OBD2 type connector ay ginagamit, na matatagpuan sa karamihan sa mga modernong dayuhang kotse at mga domestic na sasakyan. Gayunpaman, ang ilang mga modelo ng kotse, hal. Volkswagen Golf 5V, Audi S4, walang gateway. Bilang karagdagan, ang layout ng mga control unit at CAN bus ay indibidwal para sa bawat gawa at modelo ng kotse. Upang masuri ang isang CAN system gamit ang iyong sariling mga kamay, gumamit ka ng mga espesyal na kagamitan, na binubuo ng isang oscilloscope, isang CAN analyzer at isang digital multimeter.
Ang gawain sa pag-troubleshoot ay nagsisimula sa pag-alis ng boltahe ng mains (pag-alis ng negatibong terminal ng baterya). Susunod, ang pagbabago sa paglaban sa pagitan ng mga wire ng bus ay tinutukoy. Ang pinakakaraniwang uri ng CAN bus malfunction sa isang kotse ay isang short circuit o line break, pagkabigo ng mga resistor ng pagkarga at pagbaba sa antas ng pagpapadala ng mensahe sa pagitan ng mga elemento ng network. Sa ilang mga kaso, hindi posibleng matukoy ang isang malfunction nang hindi gumagamit ng Can analyzer.
Sa palagay mo ba ay mahirap ang pag-diagnose ng kotse?
Kung binabasa mo ang mga linyang ito, nangangahulugan ito na mayroon kang interes sa paggawa ng isang bagay sa iyong sarili sa kotse at tipid talaga, dahil alam mo na:
At siyempre pagod ka nang magtapon ng pera, at ang pagmamaneho sa paligid ng istasyon ng serbisyo sa lahat ng oras ay wala sa tanong, pagkatapos ay kailangan mo ng isang simpleng CAR SCANNER ELM327, na kumokonekta sa anumang kotse at sa pamamagitan ng isang regular na smartphone ay palagi kang hanapin ang problema, i-off ang CHECK at makatipid ng maraming pera!
Sinubukan namin mismo ang scanner na ito sa iba't ibang makina at nagpakita siya ng mahusay na mga resulta, ngayon inirerekumenda namin siya sa LAHAT! Upang maiwasan ka na mahulog sa isang Chinese na pekeng, nag-publish kami dito ng isang link sa opisyal na website ng Autoscanner.





